Track Assumptions:
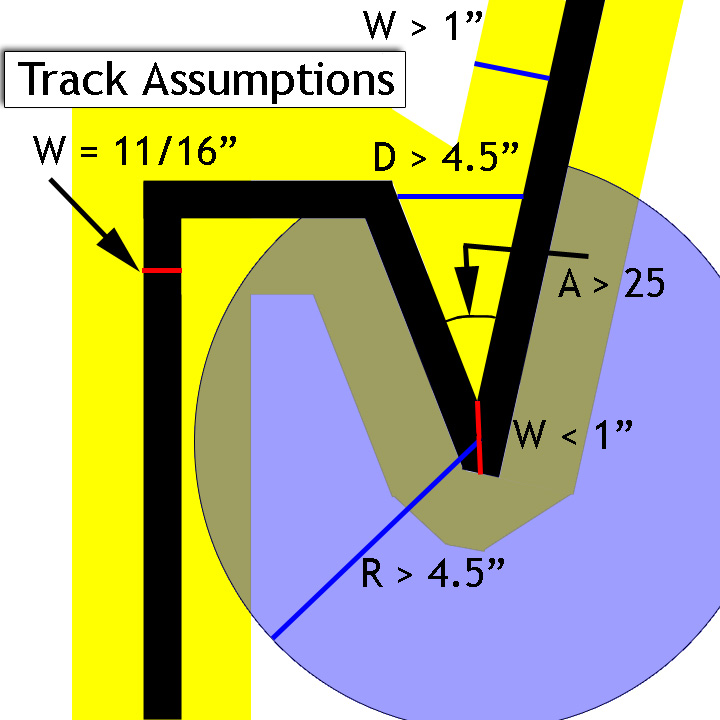
As is common with any robotics project, our group was forced to make a number of assumptions in order to allow our robot to work. The point of these assumptions is to get the robot working in an easy environment before changing the assumptions to allow the robot to work in a more difficult environment. The group before us had made an assumption that the robot would never be called to make a turn steeper than 90 degrees, and that there would be no other piece of tape within 6 inches of the piece the robot was on. We sought to significantly change the first assumption. Our new assumptions can be broken into two groups. Our first set is assumptions made about the track design, and can be seen in the diagram:
We made a few other assumptions about the construction of the car that our program would be running one.
As is common with any robotics project, our group was forced to make a number of assumptions in order to allow our robot to work. The point of these assumptions is to get the robot working in an easy environment before changing the assumptions to allow the robot to work in a more difficult environment. The group before us had made an assumption that the robot would never be called to make a turn steeper than 90 degrees, and that there would be no other piece of tape within 6 inches of the piece the robot was on. We sought to significantly change the first assumption. Our new assumptions can be broken into two groups. Our first set is assumptions made about the track design, and can be seen in the diagram:
- The track will be 11/16th of an inch wide.
- There will be nothing next to the track within an inch on either side
- Turns will be no steeper than 25 degrees.
- Since placing two pieces of tape together to make an acute angle common causes part of the track to be wider than 11/16th of an inch, the thickest the tape can be in the turn is 1 inch.
- There will be nothing within 4.5 of the center of the turn on the track. This is because the robots will no longer simply turn on a point and the sensors will do a wide sweep of the surrounding area.
- After turn, if the robot had been to continue going straight instead of starting the turn, there should be nothing on the poster board for another 4.5 to allow for momentum.
We made a few other assumptions about the construction of the car that our program would be running one.
- The sensor assembly should have a total width of 2.5 inches from the outside of the left sensor to the outside of the right sensor.
- There should be three sensors with the centers of these sensors at 0.25, 1.25, and 2.25 as measured from the outside edge of either the left or right sensor.
- The wheel axels should be 2.5 from each other, and the inside edge of the wheel should be 12 studs apart (3.75). These specifications are more important this year because of the way the motors on the outside edge of the car on the turn will be moving faster than the ones on the inside edge.
- The car will be operating with a battery power of at least 8.8. While it is possible the car will work with less power, because of the thread.sleep() calls, changing the battery power may make the car perform worse depending on track conditions.
Track Assumptions Diagram: