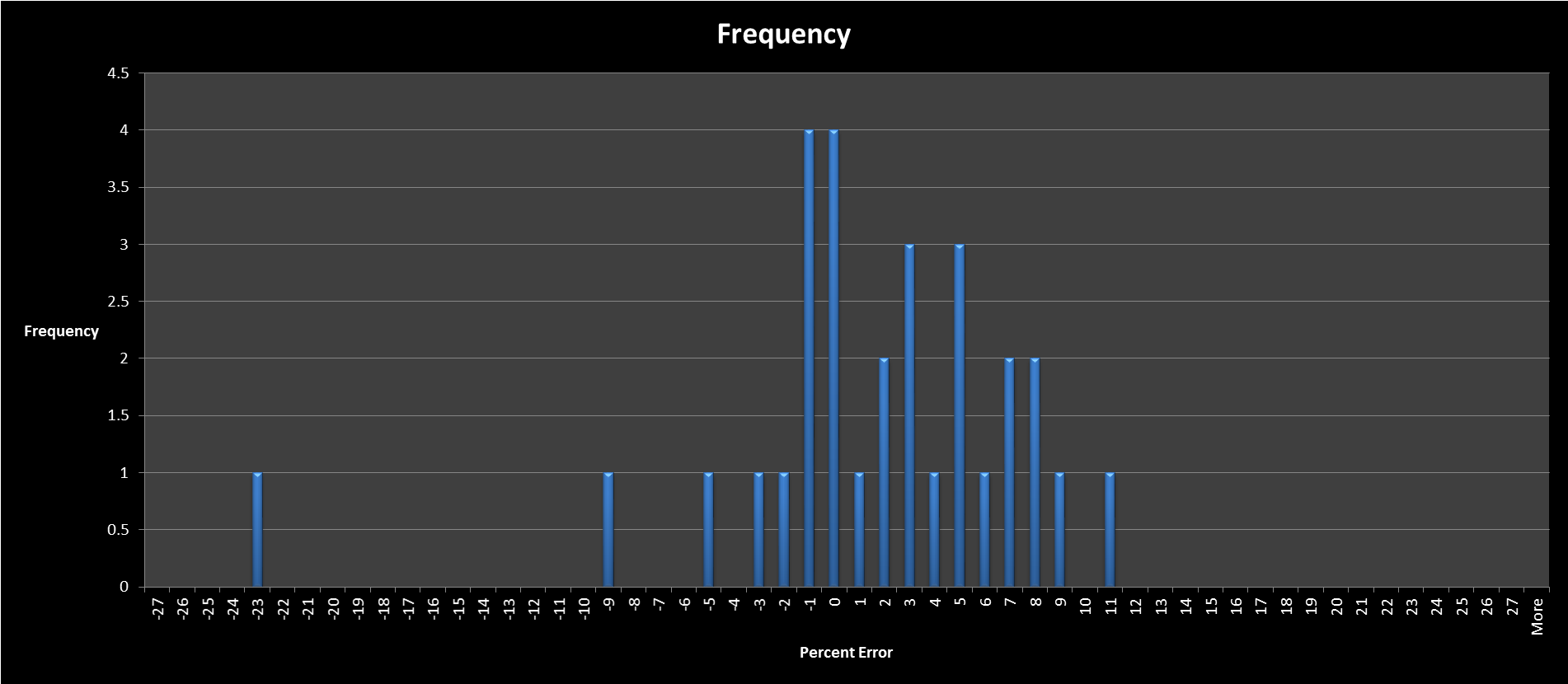
Our area of focus was the motion model. We believed that through multiple trails and measurements we could provide a more accurate estimate for how far the robot has moved. We tested this by having the robot move a randomn distance forward thirty times. We recorded its starting and ending position by chalking the carpet right in front of the robot (the chalk held perpendicular to the ground and pressed against the front of the robot for consistency). The distance measured was recorded by tape measure from the center of both marks. In order to get the estimated distance, we used the measurment tool in the simulator, measuring from front to front again. The following are the results:
| Trial | Estimate | Actual | Distance Off | Percent Error |
|---|---|---|---|---|
| Trial 1 | 1.10 | 1.01 | 0.09 | 8.91% |
| Trial 2 | 1.22 | 1.14 | 0.08 | 7.02% |
| Trial 3 | 1.55 | 1.56 | -0.01 | -0.64% |
| Trial 4 | 1.35 | 1.43 | -0.08 | -5.59% |
| Trial 5 | 1.48 | 1.43 | 0.05 | 3.50% |
| Trial 6 | 1.41 | 1.37 | 0.04 | 2.92% |
| Trial 7 | 1.14 | 1.14 | 0.00 | 0.00% |
| Trial 8 | 1.61 | 1.53 | 0.08 | 5.22% |
| Trial 9 | 1.36 | 1.30 | 0.06 | 4.62% |
| Trial 10 | 1.54 | 1.58 | -0.04 | -2.53% |
| Trial 11 | 1.30 | 1.32 | -0.02 | -1.52% |
| Trial 12 | 0.83 | 1.09 | -0.26 | -23.85% |
| Trial 13 | 1.49 | 1.35 | 0.14 | 10.37% |
| Trial 14 | 1.35 | 1.49 | -0.14 | -9.40% |
| Trial 15 | 1.48 | 1.45 | 0.03 | 2.07% |
| Trial 16 | 1.42 | 1.38 | 0.04 | 2.90% |
| Trial 17 | 1.16 | 1.18 | -0.02 | -1.69% |
| Trial 18 | 1.34 | 1.35 | -0.01 | -0.74% |
| Trial 19 | 1.58 | 1.55 | 0.03 | 1.94% |
| Trial 20 | 1.54 | 1.51 | 0.03 | 1.99% |
| Trial 21 | 1.79 | 1.72 | 0.07 | 4.07% |
| Trial 22 | 1.51 | 1.54 | -0.03 | -1.95% |
| Trial 23 | 1.01 | 1.03 | -0.02 | -1.94% |
| Trial 24 | 0.79 | 0.79 | 0.00 | 0.00% |
| Trial 25 | 1.55 | 1.49 | 0.06 | 4.03% |
| Trial 26 | 0.76 | 0.72 | 0.04 | 5.56% |
| Trial 27 | 1.19 | 1.12 | 0.07 | 6.25% |
| Trial 28 | 1.27 | 1.19 | 0.08 | 6.72% |
| Trial 29 | 1.47 | 1.48 | -0.01 | -0.68% |
| Trial 30 | 1.00 | 1.04 | -0.04 | -3.85% |
*All measurements are in meters.
*A negative number denotes that the estimate was short by that amount/percentage.
The robot averaged overestimating the distance moved by 0.81%. Accounting for human error, this amount is minor for us to base changes off of.
Other pertinent data:
| Dimension | Estimates (in) | Actual (in) |
|---|---|---|
| Length | 89.38 | 89.76 |
| Width | 43.25 | 43.40 |