Our focus on this project is on improving the sensor model and parameter tuning.
We would conduct five trials each for original and modified algorithm and keep track of the number of times they successfully localize.
| Original | Modified with * | Modified with * and log | |
|---|---|---|---|
| Trail 1 | Success | Fail | Success |
| Trail 2 | Fail | Fail | Success |
| Trail 3 | Fail | Fail | Success |
| Trail 4 | Success | Fail | Success |
| Trail 5 | Success | Fail | Success |
From the represented test data, it shows that the original function has 3 successful localization and 2 fail. The modified with only * algorithm fail all the time as the particles allocate so fast that once they all allocate , there will be no way for the algorithm to adjust the position with the particles.
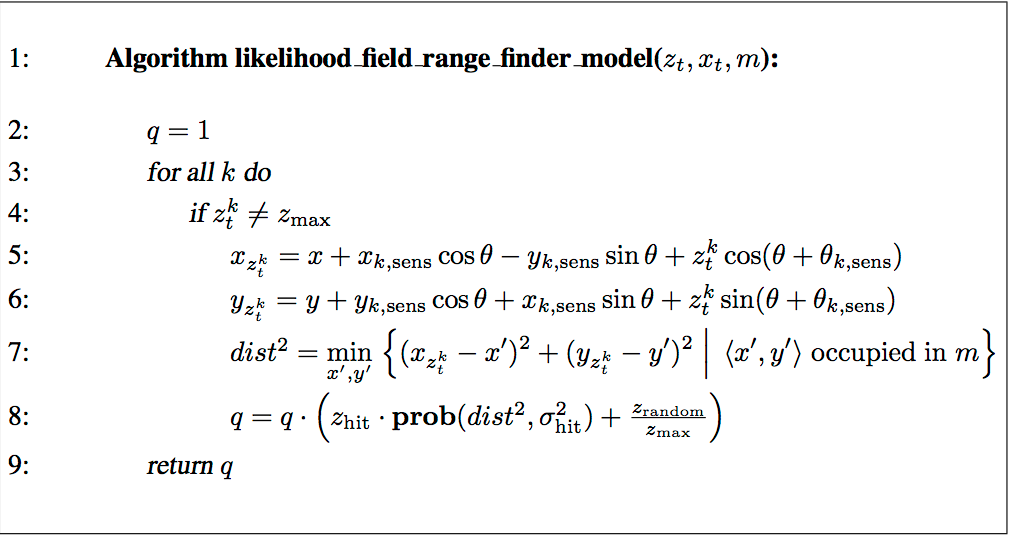
In the modified algorithm, q is changed to 3 and will return the log(q) instead of q. The reason increase q to 3 is because it will enlarge the weight between different particles as it keeps multiplying pz. Therefore, increasing q will give certain particle much larger weight and when resampling particles, particles will more likely fall on those with higher weight particles and it will increase the speed of building up possible position clusters. However, if the particles allocate too fast, then there is no way to adjust the positions. The situation happens when only times pz, particles will allocate together within three to five moves. Therefore, introducing log will help to smooth and reduce the difference within different particles here. As particles allocate in a shorter time, the time modified algorithm takes will be shorter than the time original one takes.