We are Group 2 from the CS371 Course at Gettysburg College. This project showcases our progress in solving line following problems using the PiCar-X2 from SunFounder.
After 13 meetings, our robot can now:
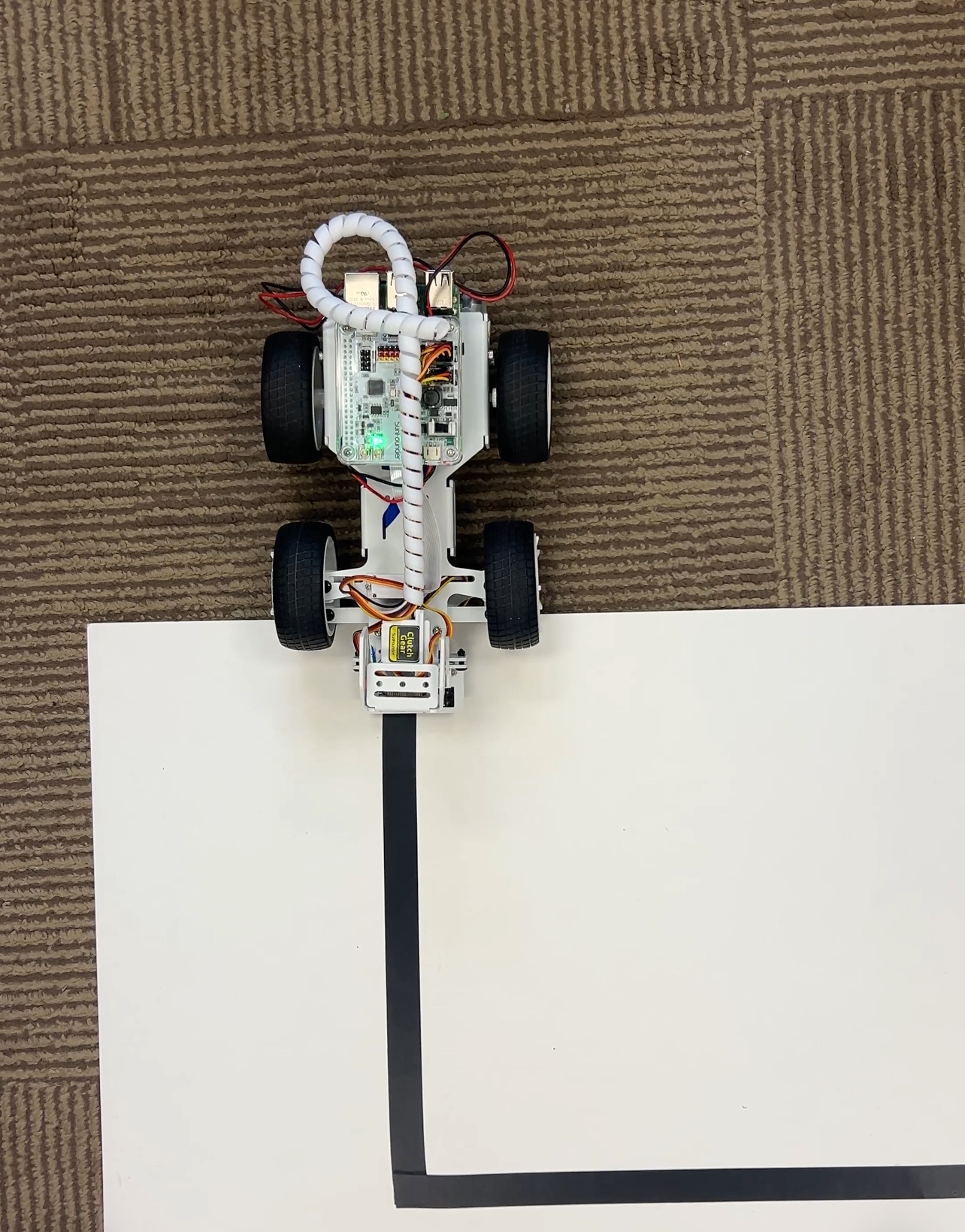
- Follow a continuous line smoothly
- Reacquire the line after a 90-degree turn (left and right)
- Detect intersections and decide whether to turn or go straight